Des chercheurs britanniques ont conçu un robot sous-marin en forme de méduse. L’objectif est qu’il puisse explorer des écosystèmes fragiles comme des récifs coralliens.
La technologie s’est souvent inspirée de la nature pour améliorer ses performances. Cette fois-ci, une équipe de scientifiques britanniques a mis au point un robot sous-marin en forme de méduse. Selon les chercheurs des universités de Southampton (dans le sud de l’Angleterre) et d’Edimbourg, il imite la façon de se mouvoir des “nageurs les plus efficaces qu’on trouve dans la nature, comme la méduse bleue ou Aurelia aurita”.
L’objectif est qu’il puisse se déplacer dans des écosystèmes fragiles comme des récifs de coraux, des sites archéologiques ou encore au milieu de nageurs. En plus de l’avoir doté de ce système unique de déplacement, ils l’ont également pourvu d’un extérieur mou et flexible, pour lui permettre de s’adapter au mieux.
La résonance pour propulsion sous-marine
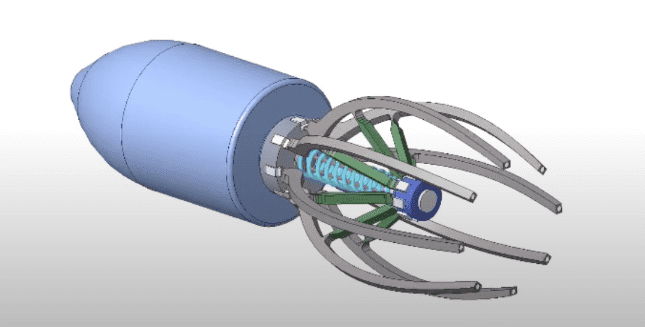
Ce robot est constitué d’une tête en caoutchouc. Elle surmonte 8 tentacules réalisées par une imprimante 3D. Il fonctionne grâce à un piston qui vient frapper à la jonction de la tête et des tentacules. Cette résonance permet au robot de générer de grands jets d’eau avec très peu d’énergie, ce qui le propulse vers l’avant. Thierry Bujard, étudiant en architecture navale à l’Université de Southampton, a conçu puis construit le robot en quelques mois. “Les tentatives précédentes de propulser des robots sous-marins avec des systèmes de jets impliquaient de pousser de l’eau à travers un tube rigide. Nous voulions aller plus loin, nous avons donc apporté l’élasticité et la résonance pour imiter la biologie” explique t-il.
Ce robot est le premier submersible à utiliser la résonance pour la propulsion sous-marine. Cette méthode est 10 à 50 fois plus efficace que les hélices utilisées habituellement pour les petits véhicules sous-marins. Pour le moment il n’a été testé qu’en bassin, les chercheurs espèrent pouvoir le lancer en conditions réelles prochainement. L’Université de Southampton souhaite utiliser ce concept pour concevoir un véhicule sous-marin entièrement manœuvrable et autonome.
Leave a Reply
You must be logged in to post a comment.